| 作成日:2005/6/15 最終更新日: 2005/6/15 |
| ◆概要 | |
空気圧を用いた産業用ロボットの仕組みを手軽に学べる,fischertechnik製 空気圧ロボットキットについて紹介します.このキットでは,コンプレッサーやソレノイド,シリンダーといった空気圧制御の基本機構を組みあわせて,四種類の産業用(?)ロボット(自動ドア,ソーティングマシン,グリッパー,プロセスセンター)を構築することができます.ここでは,実際の動作ムービーなどを示しながら,空気圧の基本的な活用方法について説明します. |
|
| |
|
| ◆fischertechnik | ||||||||||||||||||||||||
|
fischertechnikは,ブロックを組み立てることでさまざまな日用品や工業製品の構造を学ぶことのできるキットを多数販売しています.fischertechnikのキットは,以下のような特徴を持っています.
ここでは,空気圧を用いたさまざまな機構に焦点を当てた,空気圧ロボットキットについて紹介します |
||||||||||||||||||||||||
|
||||||||||||||||||||||||
| ◆空気圧ロボットキット | ||||||
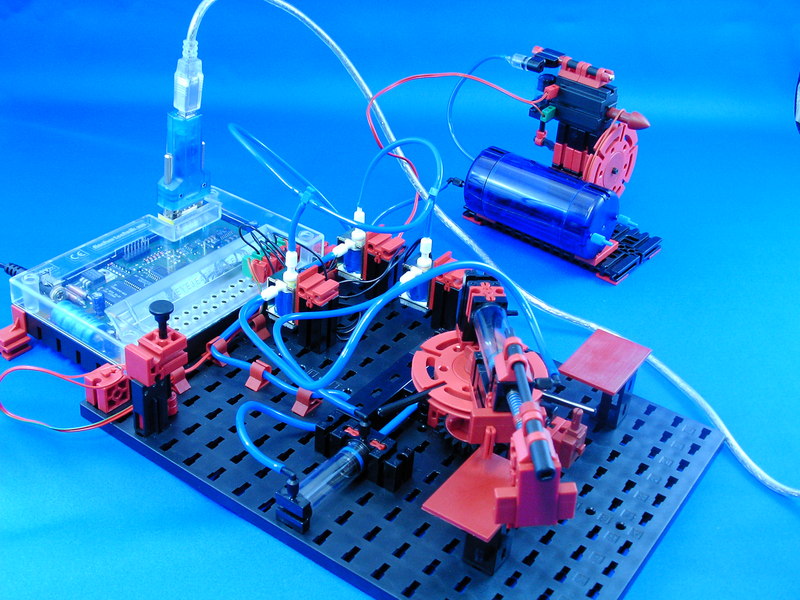
空気圧ロボットキットでは,コンプレッサーやソレノイド,シリンダーといった機構を組みあわせて,コンピュータ制御可能な空気圧ロボットを製作することができます(図4,5).空気圧制御は産業用ロボットなどに活用されている技術ですが,初心者が手軽に学ぶ機会は少ないように思います.ここではまず,,空気圧制御の基本となる三つの部品(コンプレッサー,ソレノイドバルブ,シリンダー)について説明します. |
||||||
|
||||||
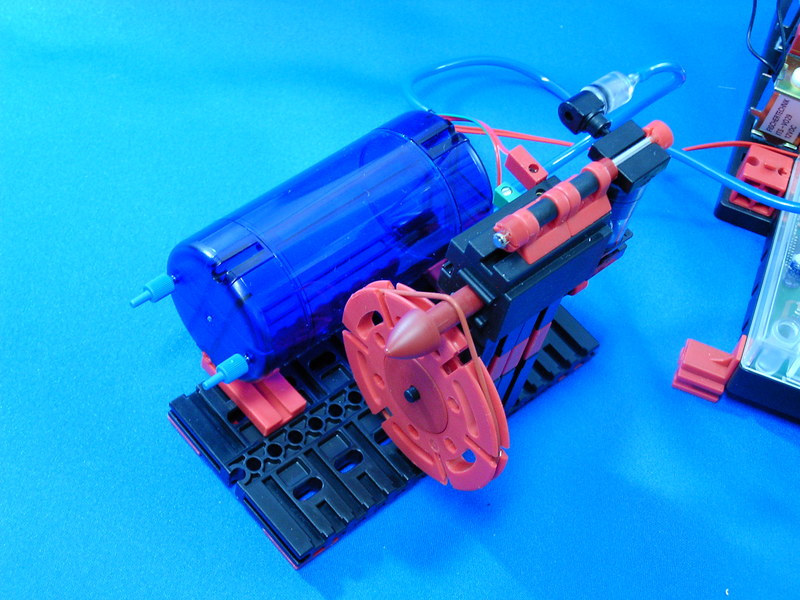
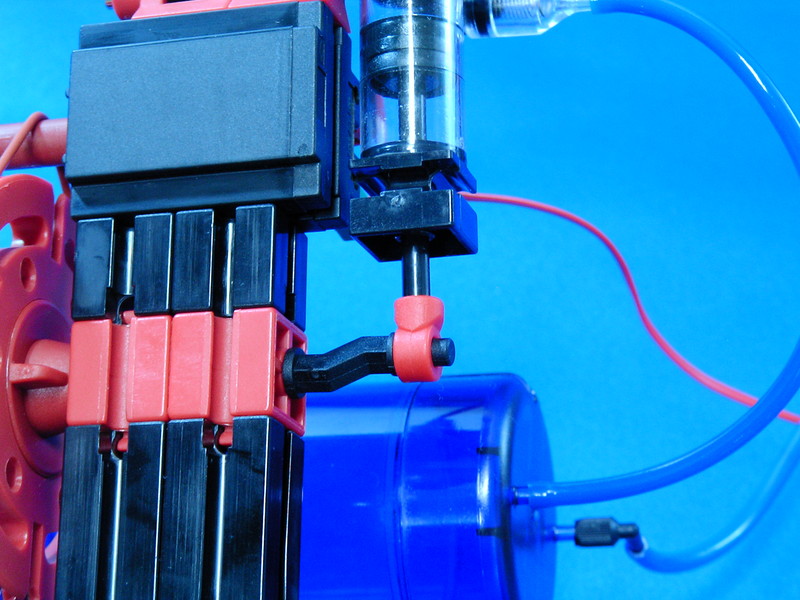
コンプレッサーは,圧縮空気を貯蔵・供給するための装置です(図6).コンプレッサーの主要動作部は図6(2)のようになります.上部の黒いモータを駆動すると,シリンダーが上下に動作し,奥側の青い空気室に圧縮空気が送り込まれます. |
||||||
|
||||||
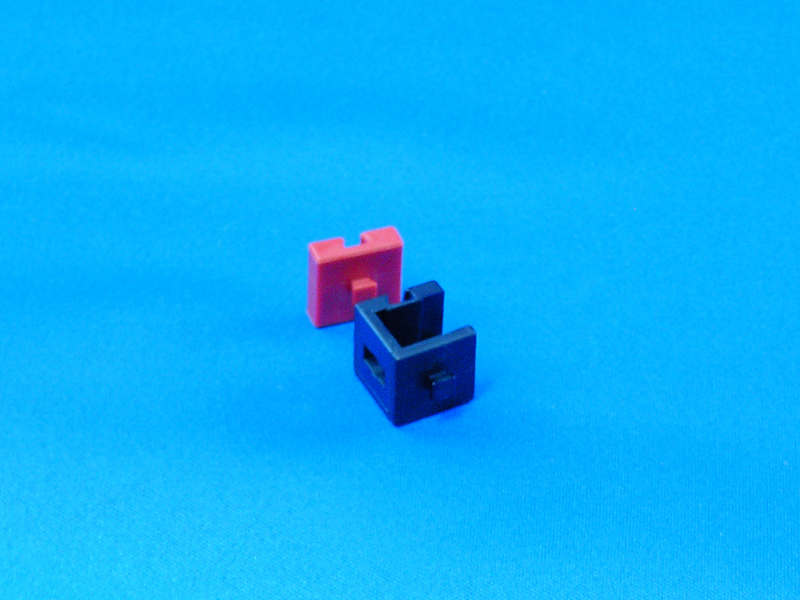
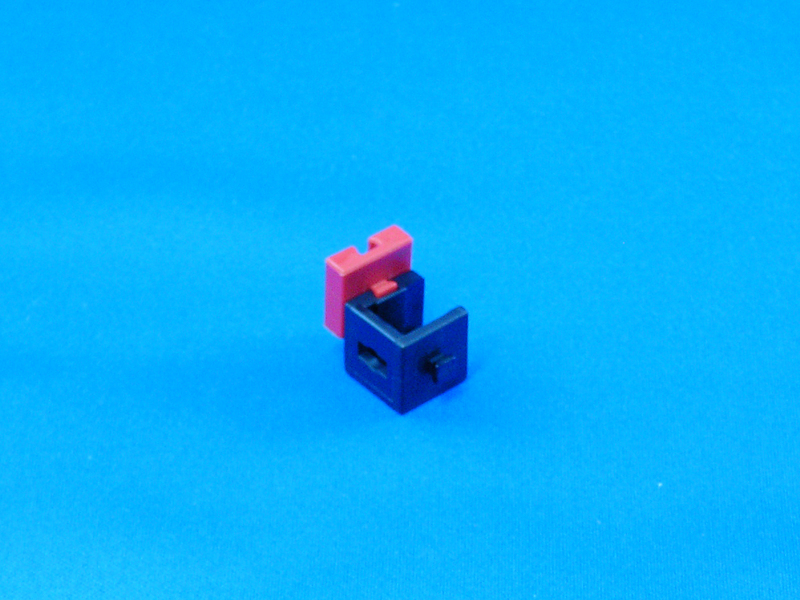
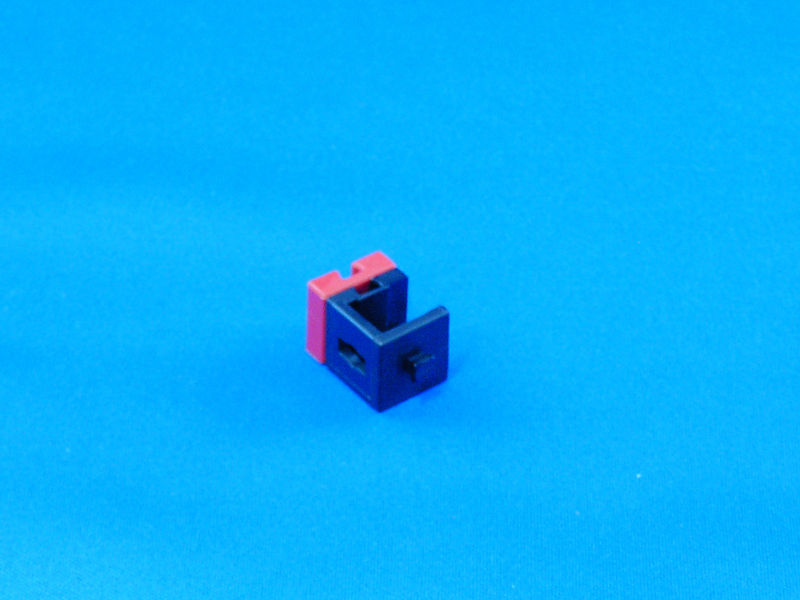
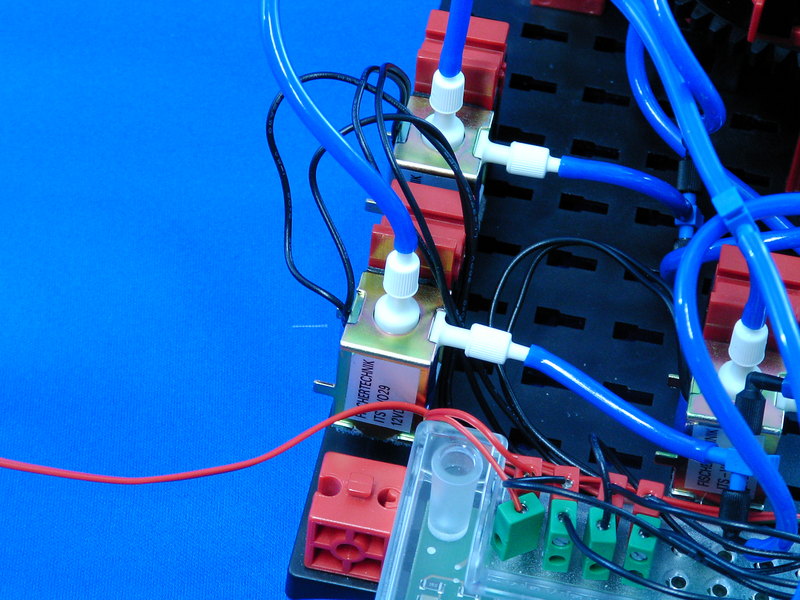
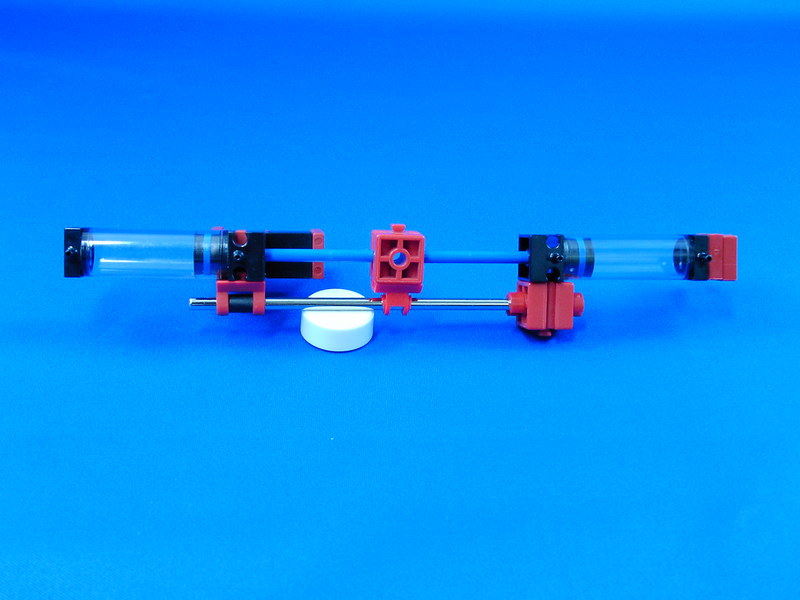
ソレノイドバルブは,主にシリンダーへの空気の流れを制御する用途に利用します(図7).内部の電磁石に電気が流れると,バルブが開いて空気がシリンダーへと流れ,電気を止めるとバルブが閉じて空気は下部の通気孔から逃げます. シリンダーは,二つのバルブから圧縮空気を送ることで前後に高速動作します(図8).シリンダーの前後運動と歯車などを組み合わせることで,さまざまな動作を実現できます, |
||||||
|
||||||
| 以下,このキットを利用して製作できる四種類のロボット(?)について紹介していきます. | ||||||
| ◆製作例 | |||||||||||||||
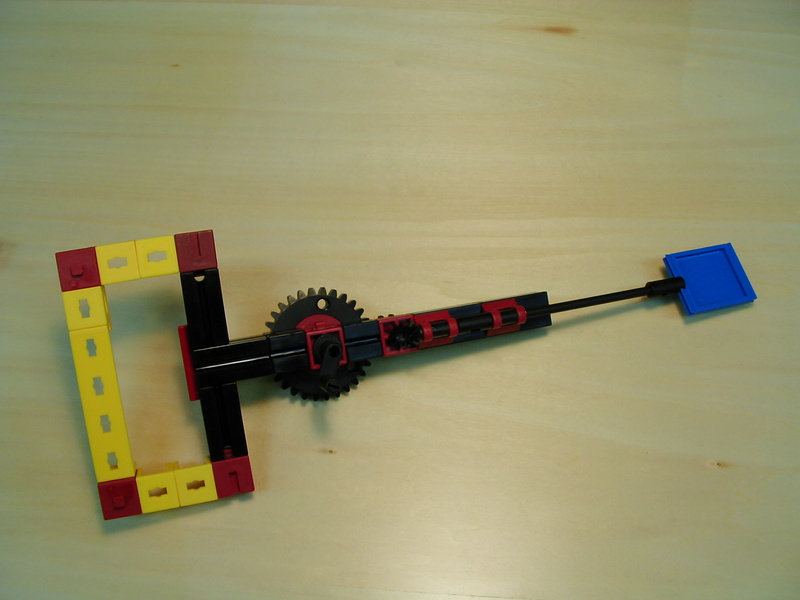
ひとつのシリンダーのみを用いたシンプルな半自動ドアです(図9).ドアを軽く押すことですばやくドアを全開し,前に手をかざすことでドアを閉じることができます.
開くトリガーはドア側面に取り付けたスイッチで,閉じるトリガーはドア正面に取り付けたフォトダイオードで検出しています. |
|||||||||||||||
|
|||||||||||||||
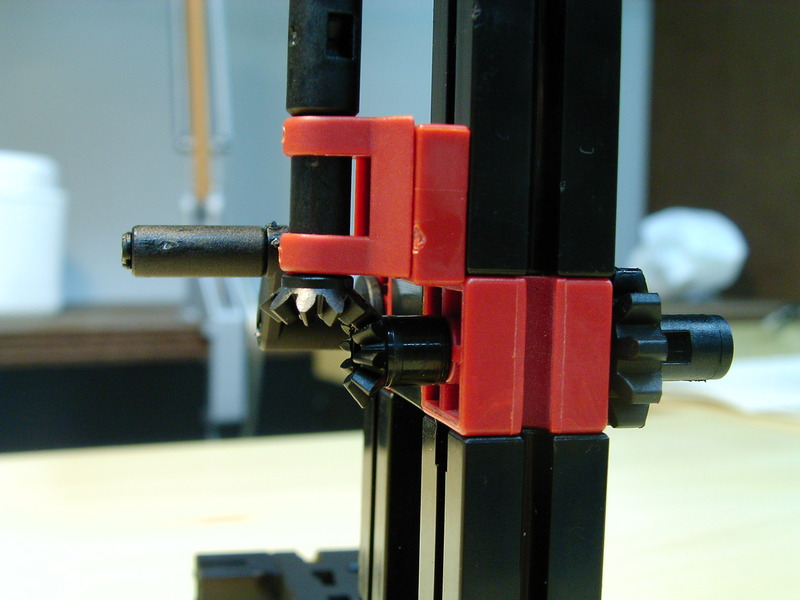
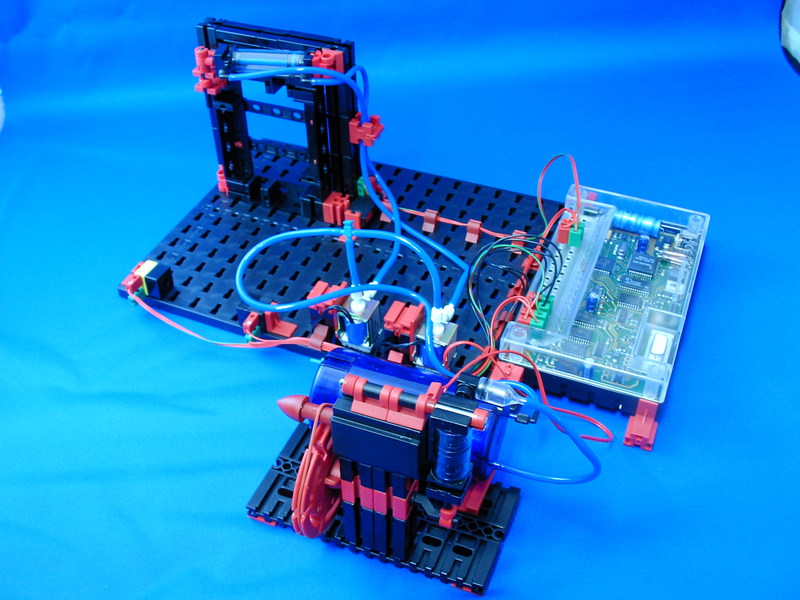
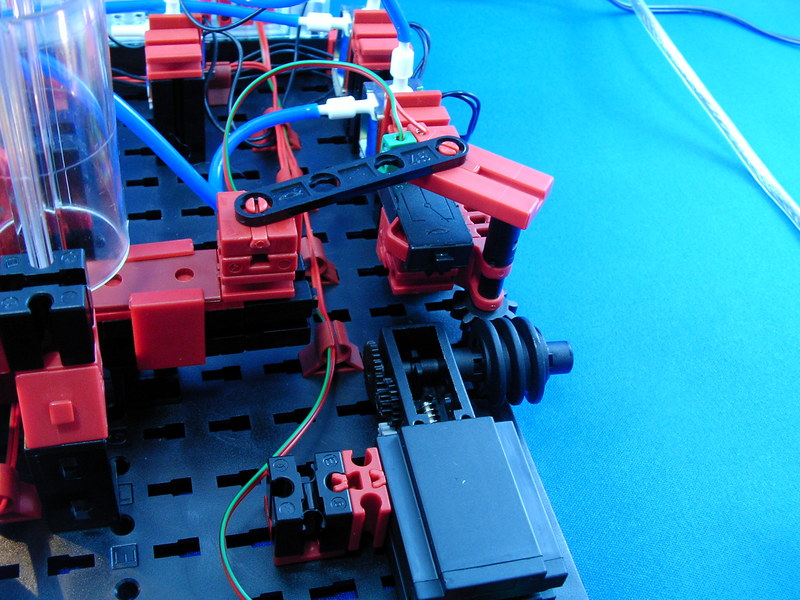
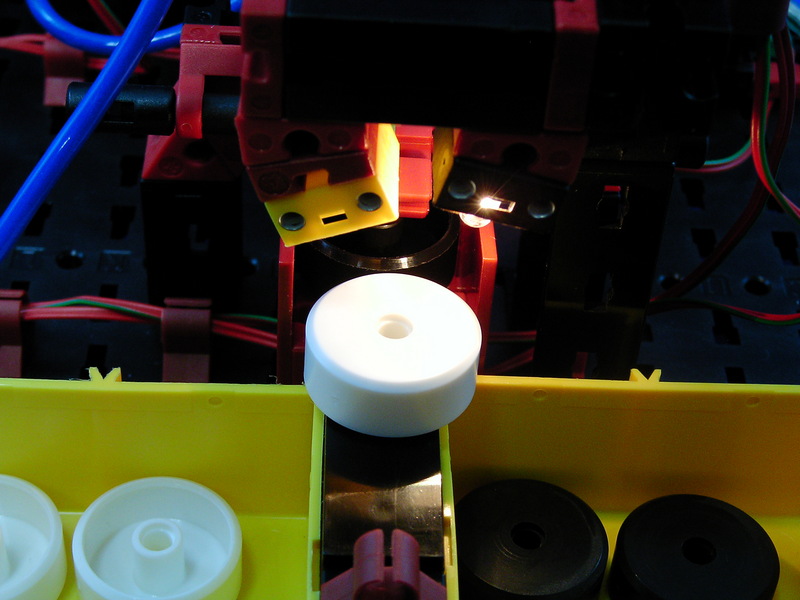
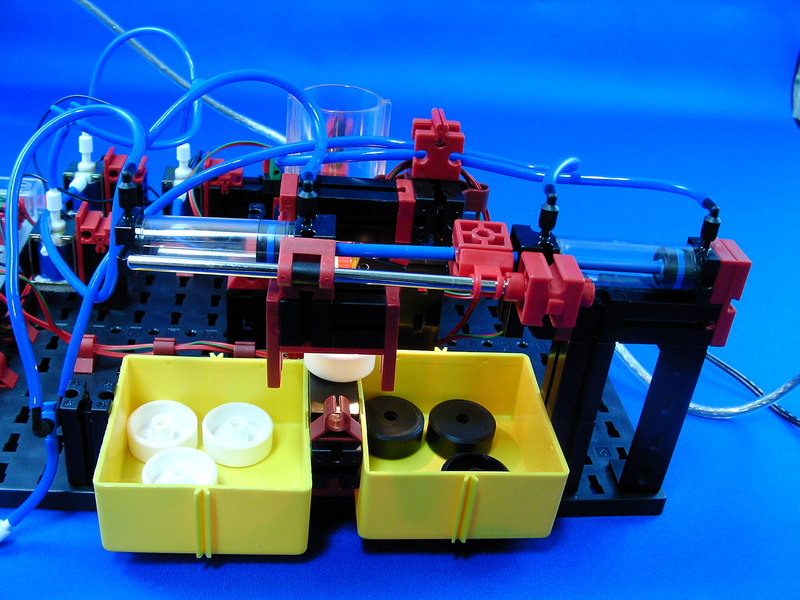
二つのシリンダーを用いたソーティングマシン(仕分け機)です(図10).送り出し装置によりブロックが一つずつ送り出され,判別装置により白/黒の種別を判定し,仕分け装置により左右に分類されます(図11).
送り出し装置はモーターと多数の歯車などを組み合わせた少々複雑なもので,モーターの回転をゆっくりとした水平運動に変換しています(図11(1)). |
|||||||||||||||
|
|||||||||||||||
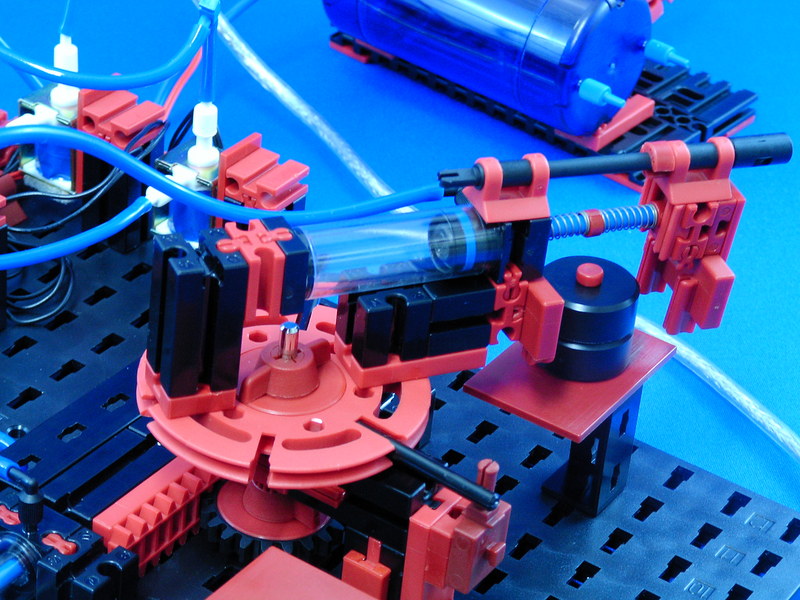
二つのシリンダーを用いた,シンプルなグリッパー(ロボットハンド)です(図12).台の上に置かれたブロックを掴み,もう一方の台へと高速で移動する動作を繰り返します.
グリッパーの動作は,大きく分けて台座の回転とハンドの開閉の二種類です. |
|||||||||||||||
|
|||||||||||||||
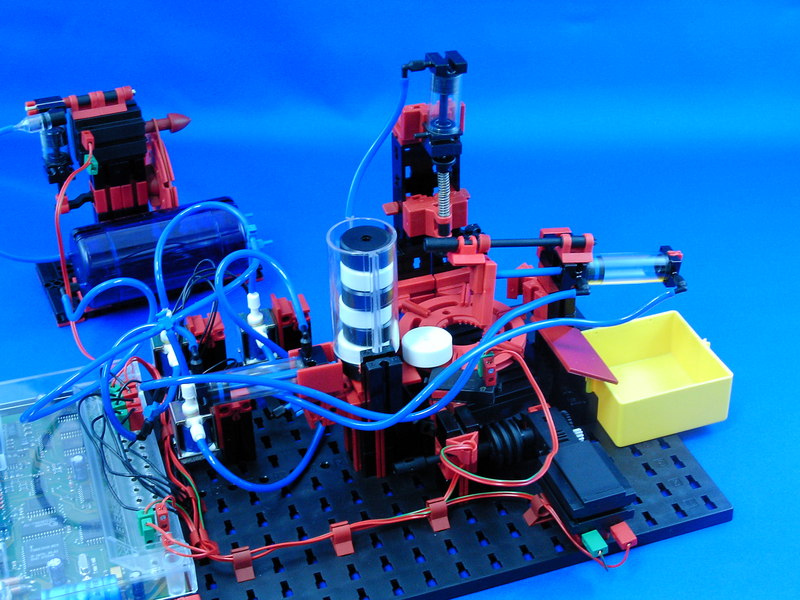
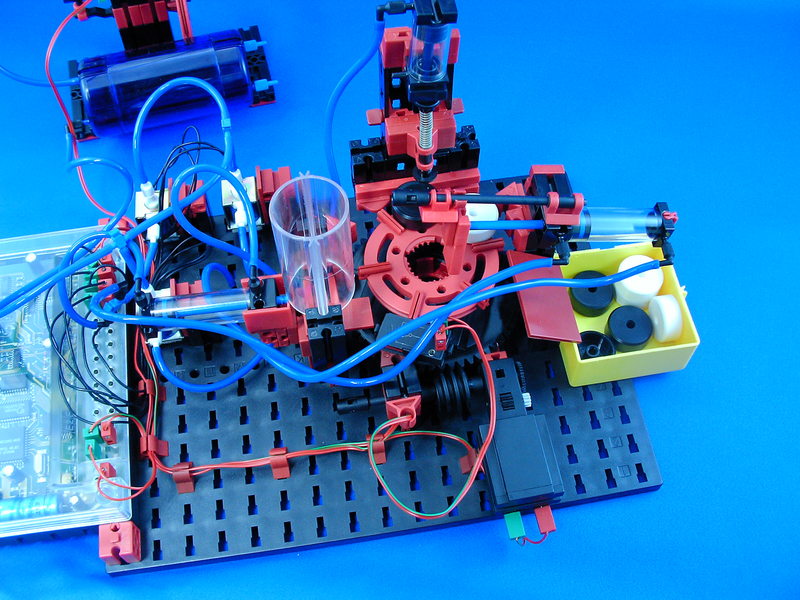
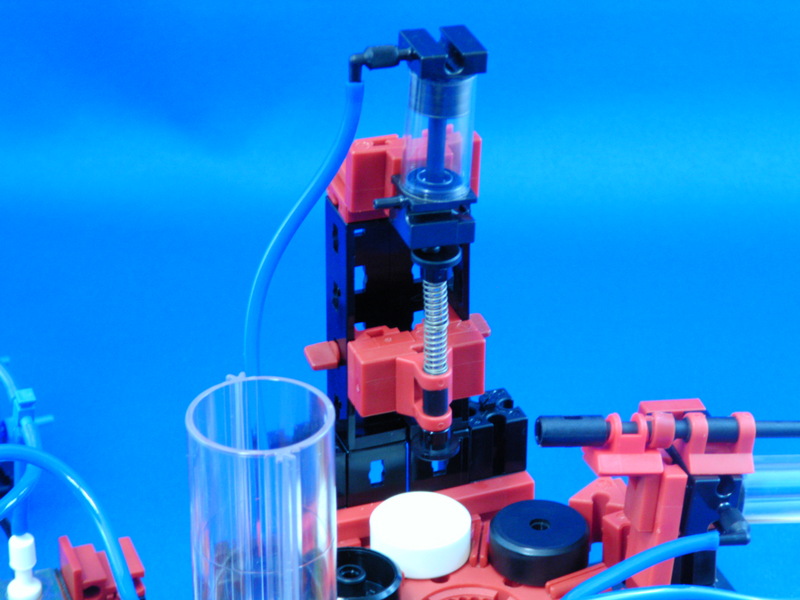
三つのシリンダーを用いた,工場の生産ラインを模したシステムです(図14).ブロックは一つずつ送り出され,プレス加工(風の動作)を加えられ,ラインから排出されます.
送り出し装置は,シリンダーで直接ブロックを送り出した後,モーターで円状のライン部を回転させます(図15(1)).回転/停止の制御はスイッチ(図15(1)下部)にライン部の突起が接触することで行われます. |
|||||||||||||||
|
|||||||||||||||
| ◆おわりに | |
|
ここでは,空気圧を用いた産業用ロボットの仕組みを手軽に学べる,fischertechnik製空気圧ロボットキットについて,製作例を中心に紹介してきました.空気圧制御は産業用ロボットなどに活用されている技術ですが,初心者が手軽に学ぶ機会は少ないように思われます.特に,自動ドアやグリッパーのムービーに見られる高速で力強い動作は,モーターなどではなかなか出しにくい動きですので,面白い使い方ができるかもしれません.各種キットは下記関連リンクなどから購入できますので,興味のある方は試してみてください. |
|
| ◆関連URL |
|
[デバイスふらり旅]