|
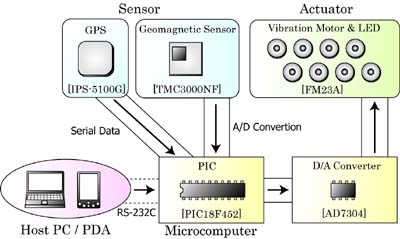
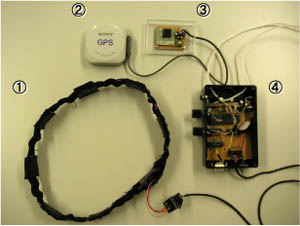
We developed a prototype system of ActiveBelt based on the above concepts. The prototype system consists of four factors: (1)ActiveBelt hardware, (2)a GPS, (3)a directional sensor, and (4) a microcomputer (Fig. 3). Fig. 4 shows the system architecture of ActiveBelt.
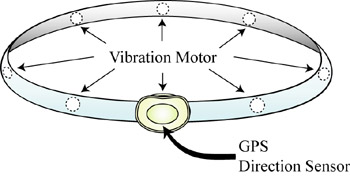
We attached eight vibrators (FM23A by TPC) and LEDs 3 in the belt. The diameter of FM23A is about 18 mm, and the thickness is about 3 mm. We attached four vibrators in center of abdomen, in center of back, near a left sidebone, and near
a right sidebone. We also attached other four vibrators in middle points between above four points.
We used the geomagnetic sensor(TMC3000NF by NEC Tokin) to detect an orientation of a user. We used IPS-5100G (by Sony) as a GPS. We used the spherical trigonometry to calculate a relative direction and distance to a destination.
We used a microcomputer (PIC18F452 by MicroChip) to control sensors and vibrators. The functions of the microcomputer are as follows: (1) controlling vibrators and LEDs based on input data from sensors, and (2) communicating with host PC/PDA.
|